 Canada Journal – News of the World Articles and videos to bring you the biggest Canadian news stories from across the country every day
Canada Journal – News of the World Articles and videos to bring you the biggest Canadian news stories from across the country every day
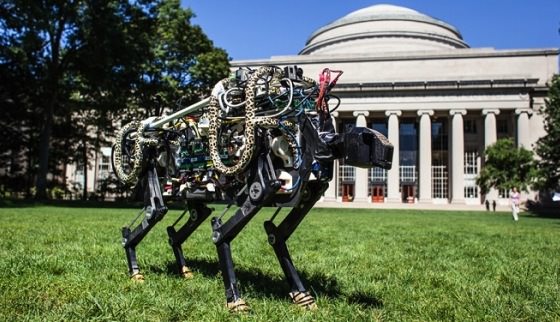
Engineers at MIT in the US have completed their Cheetah robot, an agile machine that can navigate bumpy terrain in almost eerie silence, and hit sprinting speeds of up to 48 km/h (30 m/h).
According to Jordan Pearson at Motherboard, the secret to this robot’s smooth gait is an algorithm that allows it to control the force of its footfalls, which means it can decide how hard to strike the ground as it makes each step.
This force-control approach to robotic running is similar, in principle, to the way world class sprinters like Usain Bolt race,” said Sangbae Kim, an associate professor of mechanical engineering at MIT.
In experiments on an indoor track, the robot sprinted up to 10 miles per hour, even continuing to run after clearing a hurdle.
The researchers estimate that the current version of the robot may eventually reach speeds of up to 30 miles per hour.
The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground, in order to maintain a given speed.
In general, the faster the desired speed, the more force must be applied to propel the robot forward.
“By adapting a force-based approach, the cheetah-bot is able to handle rougher terrain such as bounding across a grassy field,” Kim added.
In treadmill experiments, the team found that the robot handled slight bumps in its path, maintaining its speed even as it ran over a foam obstacle.
The authors are scheduled to present details of the bounding algorithm this month at the IEEE/RSJ International Conference on Intelligent Robots and Systems in Chicago.
Agencies/Canadajournal


